Path planning for wheeled robot
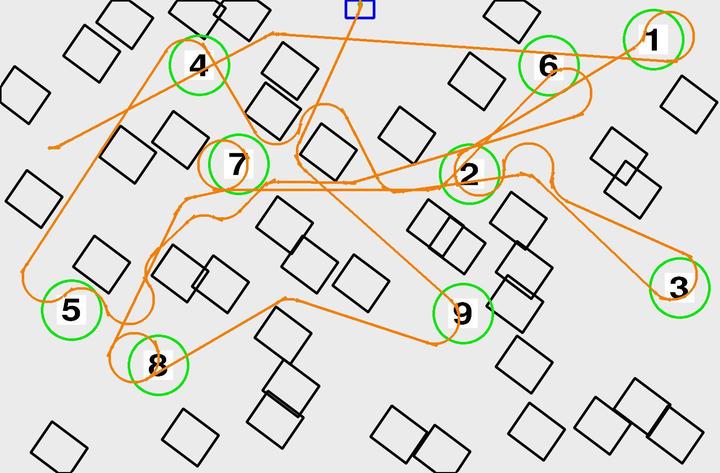
Plan a path for a wheeled robot: given an image taken from the top of a robot in an environment with obstacles and a goal, the objective of the project was to plan a path to reach the goal, avoiding the obstacles. The project was written in C++ with the image processing part done with OpenCV. Project for the course of Laboratory of Applied Robotics at the University of Trento.
Simone Zamboni
Machine Learning Research Engineer
Engineer passionate about large language models and robotics.